James Hermus

James Hermus is currently a Postdoctoral Researcher in the Robot Learning & Interaction Group at the Idiap Research Institute, working on manipulation research under the direction of Dr. Sylvain Calinon. Prior to this, he was a Postdoctoral Researcher in the Learning Algorithms and Systems (LASA) Laboratory at EPFL, under the supervision of Professor Aude Billard.
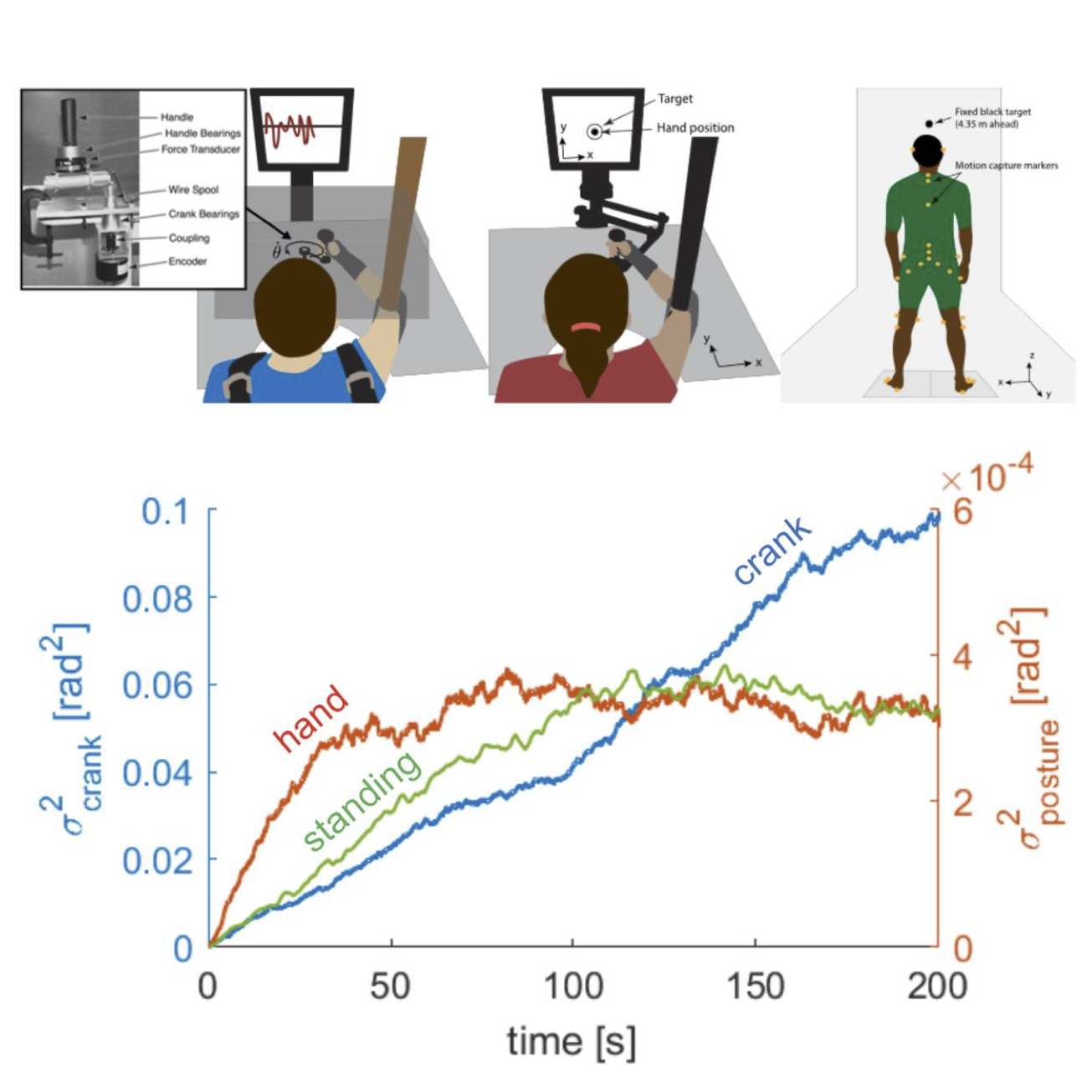
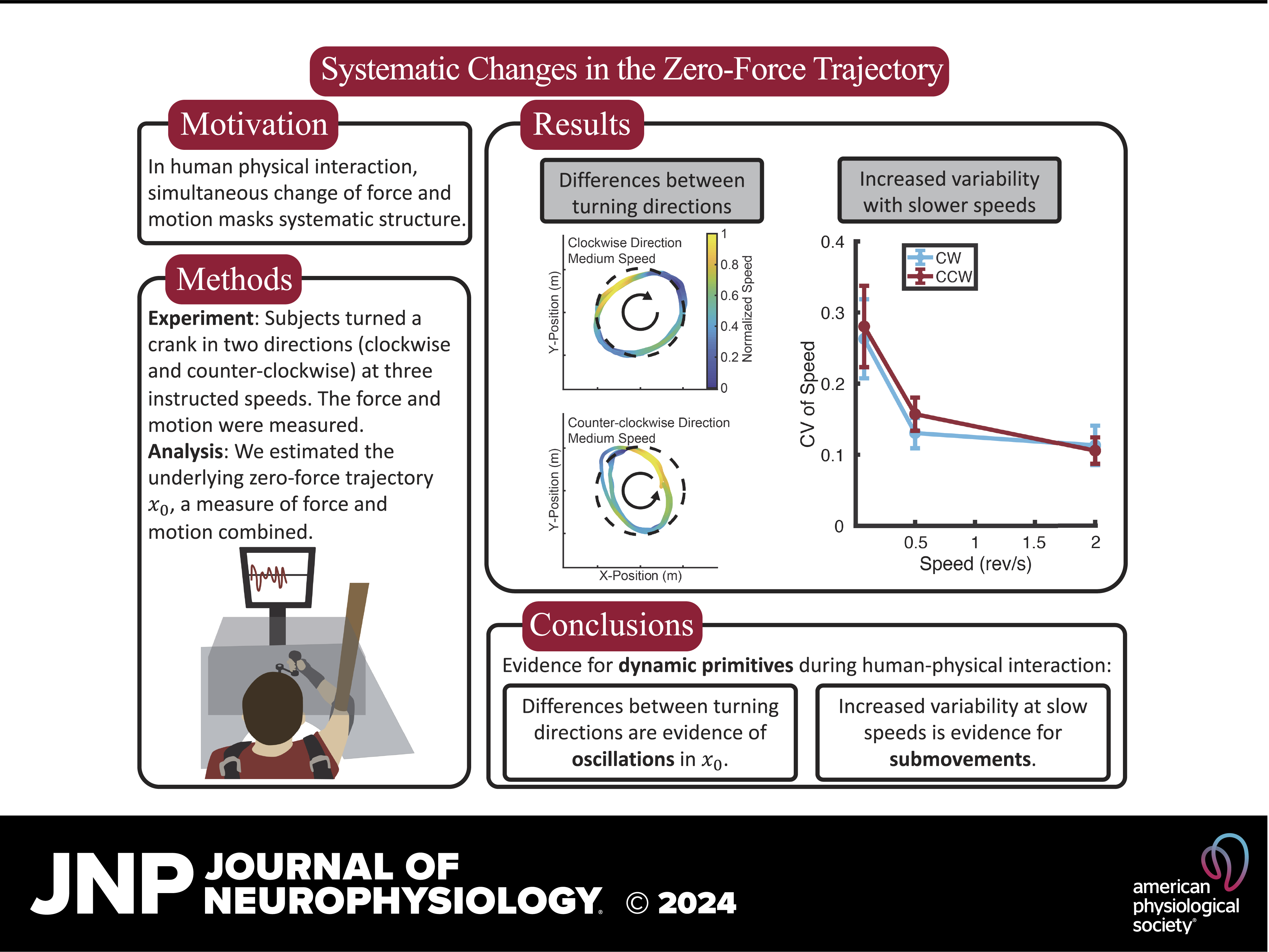
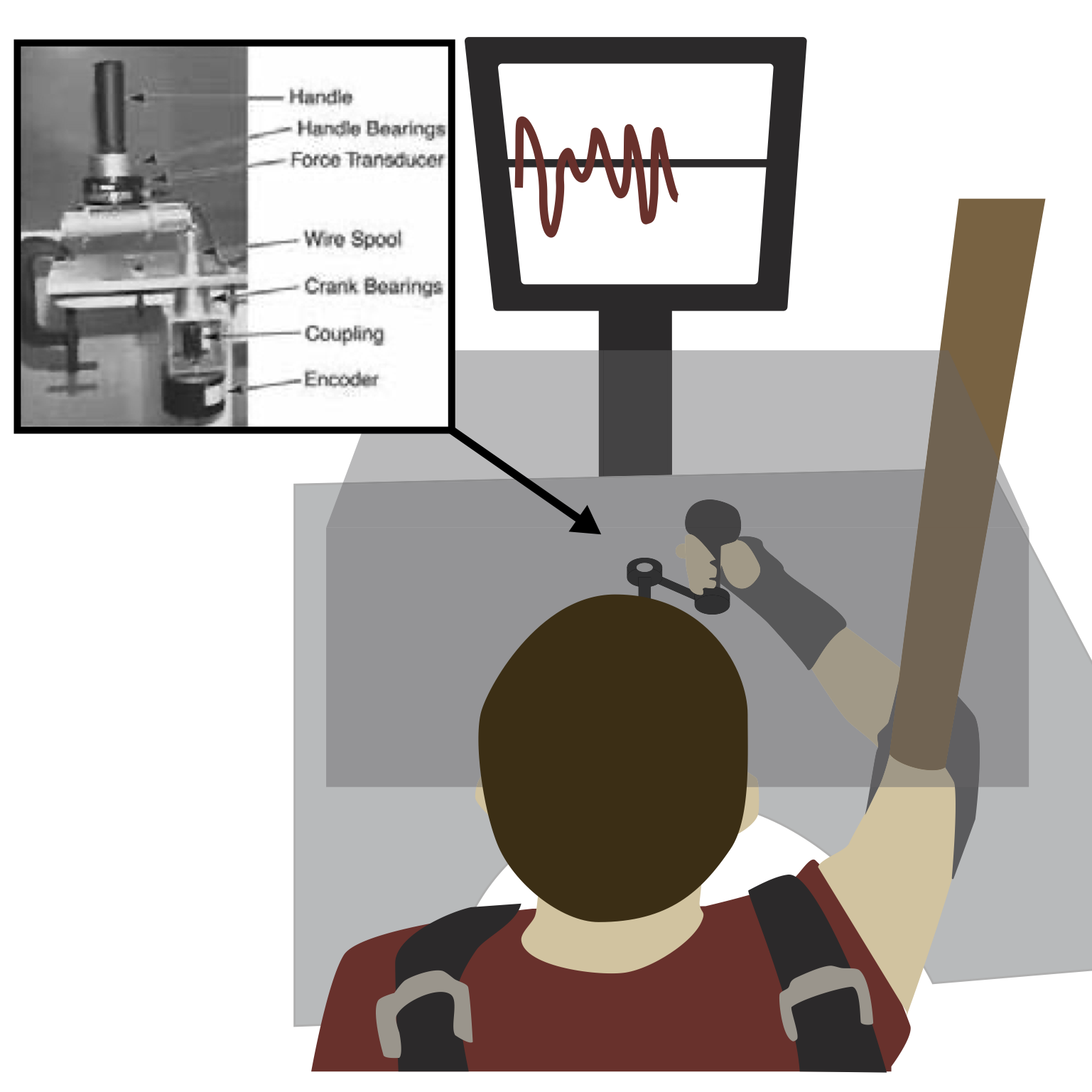
James earned his PhD in Mechanical Engineering from MIT as part of the Newman Laboratory, where he conducted research under the guidance of Professor Neville Hogan. His dissertation research investigated human physical interaction during circularly constrained motion–turning a crank. The focus of his work was to understand fundamentals about how humans manage physical interaction to improve rehabilitation and robotics.
Originally from Wisconsin, he earned his bachelor’s degree in Biomedical Engineering with an Honors in Research at the University of Wisconsin – Madison in 2016. During his undergraduate studies, he worked in the Neuromuscular Biomechanics lab of Professor Darryl Thelen where he helped in the design and testing of a novel sensor for measuring tendon stress. James is especially interested in research that will aid individuals with disabilities.
Outside of research James enjoys rock climbing, ski touring, and working on projects. As a graduate student he was heavily involved with the MIT Outing Club (MITOC) and MakerWorkShop.

Research Interests
- Physical interaction -- tasks with substantial force and motion
- Kinematic redundancy
- System identification of mechanical impedance
News
| Nov 20, 2025 | Paper published to Robotics and Automation Magazine, “Impact-aware dual-arm manipulation” by James Hermus, Michael Bombile, Jari van Steen, Elise Jeandupeux, Ahmed Zermane, Alessandro Melone, Mario Troebinger, Claude Lacoursiere, Stijn de Looijer, Sami Haddadin, Abderrahmane Kheddar, Alessandro Saccon, and Aude Billard. Now avalible at [Link]. |
|---|---|
| Aug 15, 2025 | Paper published to Scientific Reports – Nature, “Tuning of Task-Relevant Stiffness in Multiple Directions” by Chenguang Zhang, Federico Tessari, James Hermus, Himanshu Akolkar, Neville Hogan, and Andrew B. Schwart. Now avalible at [Link]. |
| Jul 2, 2025 | I am honored to share that I have been awarded the Ambizione Grant 876k CHF (~1.1M USD) from the Swiss National Science Foundation for my project Confronting the Paradox of Human Motor Control – Leveraging Subtractive and Generative Models. This four-year project will be hosted at the Idiap Research Institute in Switzerland, in collaboration with Sylvain Calinon and Auke Ijspeert. This marks the beginning of my role as a principal investigator (PI), with funding to recruit my first PhD student. |
| Jun 12, 2025 | Invited speaker at the Lorraine Research Laboratory in Computer Science and its Applications (LORIA) in Nancy, France, where I presented the talk “Confronting the Paradox of Human Motor Control”. |
| Feb 9, 2025 | Paper accepted to IEEE RA-L, “Learning the Inverse Hitting Problem” by Harshit Khurana, James Hermus, Maxime Gautier, and Aude Billard, and it is now available [Link]. |
| Oct 15, 2024 | Started a Postdoctoral Research position in Switzerland in the Robot Learning & Interaction Group at Idiap Research Institute under the direction of Sylvain Calinon, PhD |