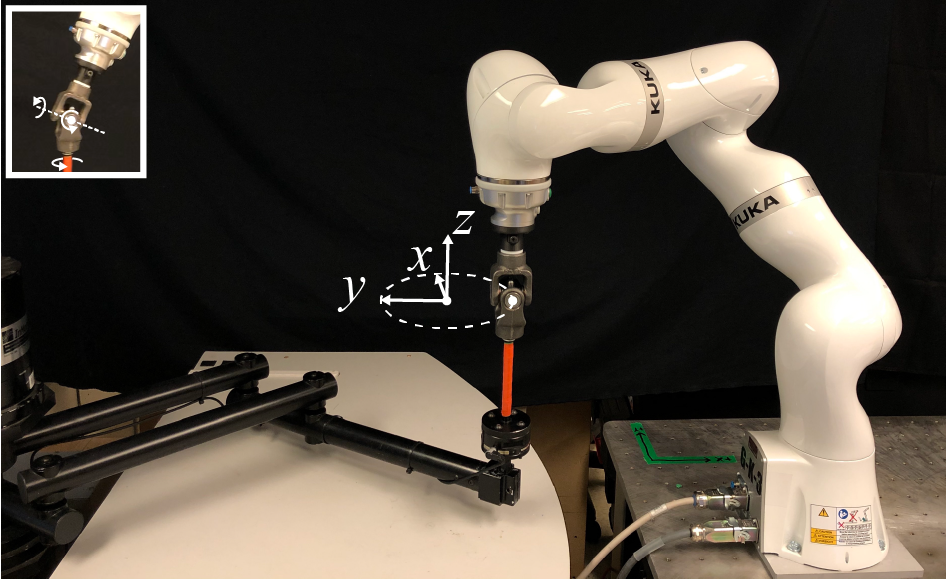
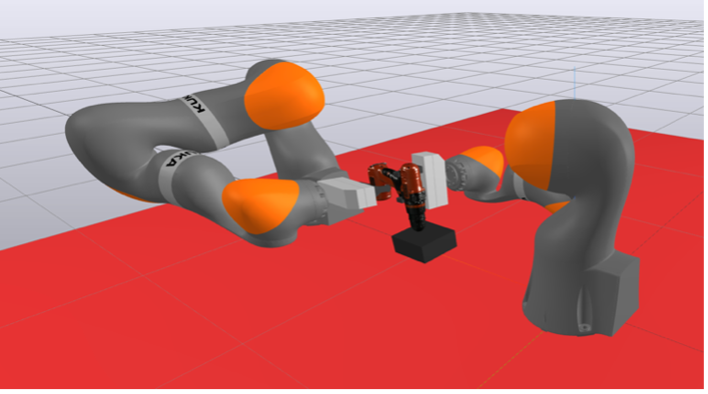
work Exploiting Redundancy to Facilitate Physical Interaction This work was published in IEEE T-RO. The below video was presented as an oral presenation and poster as part of ICRA 2022 in Philadelphia. Manipulation Project Term project for MIT course 6.843 - Robotic Manipulation taught by Russ Tedrake. Exoskeleton Cuff UWNMBL Projects from when I was an undergraduate student at UW-Madison as a member of the Neuromuscular Biomechanics Lab