Publications
All of the journal papers which I have contributed to are freely available on this website. If you have trouble accessing any papers related to my work or that of my lab members please email me directly.
2025
-
 Impact-Aware Dual-Arm Manipulation: A Framework for Fast Package HandlingJames Hermus, Michael Bombile, Jari J. Steen, and 11 more authorsIEEE Robotics & Automation Magazine 2025
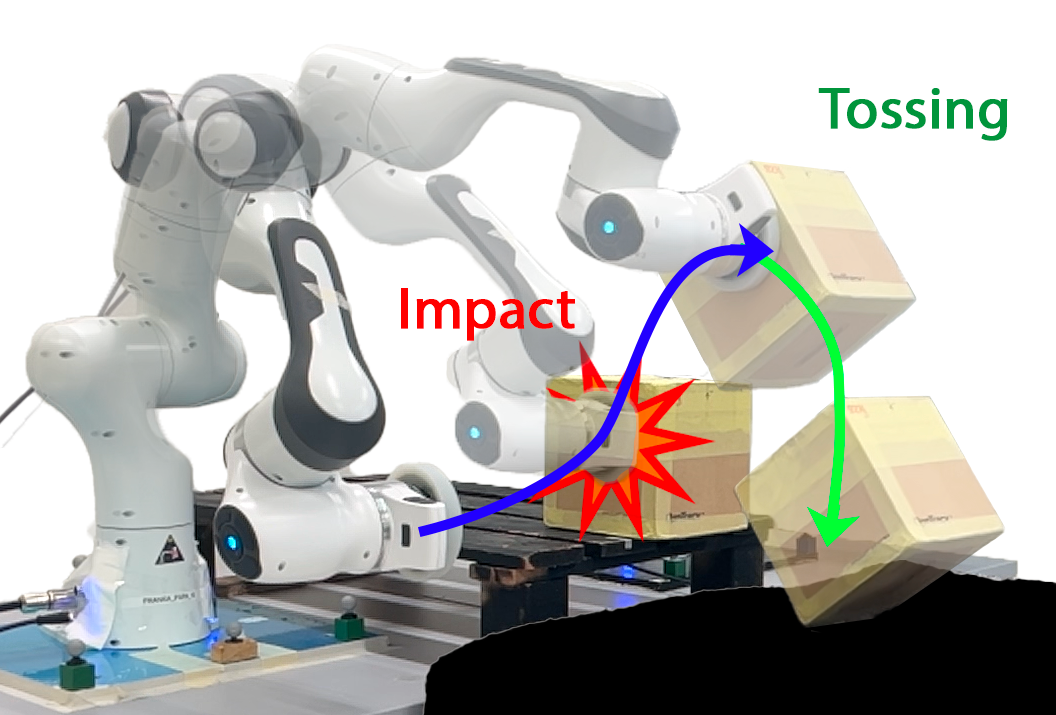
Impact-Aware Dual-Arm Manipulation: A Framework for Fast Package HandlingJames Hermus, Michael Bombile, Jari J. Steen, and 11 more authorsIEEE Robotics & Automation Magazine 2025This article presents an impact-aware manipulation framework and its application to logistics, where the challenges related to the booming of e-commerce have increased the need for faster and more flexible package handling solutions. Particularly, the proposed impact-aware framework addresses the problem of swiftly grabbing and placing objects in depalletizing tasks with dual-arm robotic systems. Impact-aware robotics leverages intentional collisions to achieve dynamic interactions and thus has the potential to be faster and more energy efficient than the state of the art based on quasi-static interactions with objects or environments. The generation of desired impacts (contacts at a nonzero relative speed), generally avoided in classical robotics, brings multiple challenges encompassing the generation of robust motions, managing the impact with the object, dealing with the physical constraints of the robotic systems, contact state sensing, and simulation of contact behavior. To tackle these challenges, we developed, within the European Union (EU)-funded project Impact-Aware Manipulation (I.AM.), impact-aware technologies that yield an integrated impact-aware solution. The proposed framework exploits nonsmooth mechanics to provide robot‒object‒environment impact models; it uses dynamical systems (DSs) to generate nominal and contingency motions with intentional impacts; it leverages quadratic programming (QP)-based control to provide motion execution with the ability to enforce hardware and safety constraints; it employs internal state sensing that does not require an external force transducer; and, finally, it develops an impact simulation environment that can handle batch simulations. This article highlights the benefits of the proposed approach in terms of speed (a 29% decrease in average task time) and energy efficiency (a 35% decrease) through a systematic comparison between classical grabbing and impact-aware swift grabbing and tossing. In summary, our article underscores the transformative potential of impact-aware technologies in revolutionizing robotic logistics operations. An accompanying video is available at https://youtu.be/0Tv-MxO0rG0.
@article{Hermus_2025, author = {Hermus, James and Bombile, Michael and van Steen, Jari J. and Jeandupeux, Elise and Zermane, Ahmed and Melone, Alessandro and Troebinger, Mario and Naceri, Abdeldjallil and Lacoursiere, Claude and de Looijer, Stijn and Haddadin, Sami and Kheddar, Abderrahmane and Saccon, Alessandro and Billard, Aude}, journal = {IEEE Robotics & Automation Magazine}, title = {Impact-Aware Dual-Arm Manipulation: A Framework for Fast Package Handling}, year = {2025}, volume = {}, number = {}, pages = {2-14}, keywords = {Robots;Robot sensing systems;Sensors;Service robots;Robot kinematics;Force;Industries;Automation;Logistics;Collaborative robots}, doi = {10.1109/MRA.2025.3615262}, } -
 Tuning of task-relevant stiffness in multiple directionsChenguang Zhang, Federico Tessari, James Hermus, and 3 more authorsScientific Reports 2025
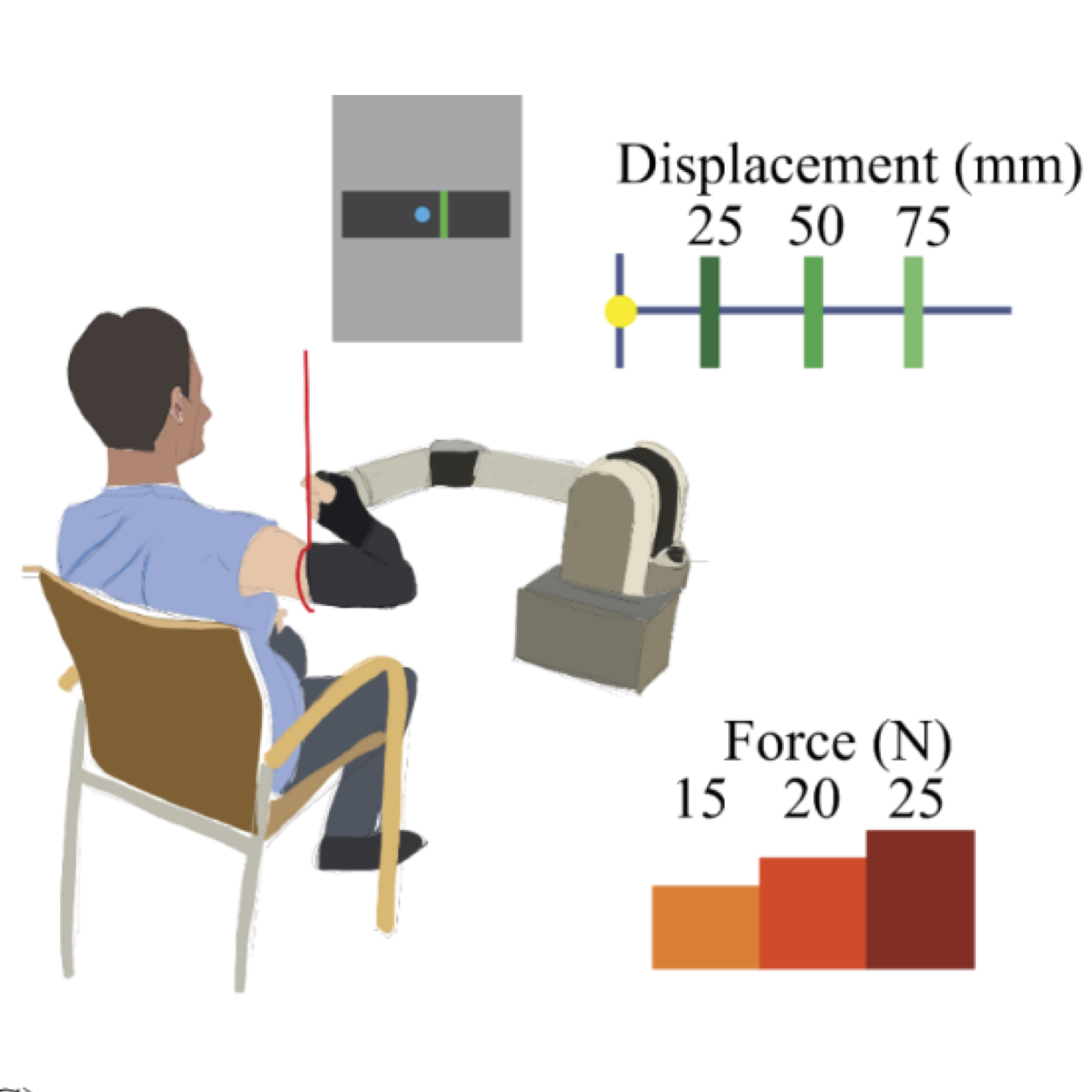
Tuning of task-relevant stiffness in multiple directionsChenguang Zhang, Federico Tessari, James Hermus, and 3 more authorsScientific Reports 2025In contrast to robots, humans can rapidly and elegantly modulate the impedance of their arms and hands during initial contact with objects. Anticipating collisions by setting mechanical impedance to counter near-instantaneous changes in force and displacement is one reason we excel at manipulating objects. We investigated the ability to set impedance in an object interaction task with rapid changes in force and displacement, like those encountered during manipulation in different directions. Subjects (n = 20) predictively co-activated antagonist muscles to adjust one component of the impedance –stiffness –to match the task demands before the movement began, irrespective of movement direction. Subjects adopted the minimal stiffness needed to complete the task, but when pushed to the most difficult condition, they were limited by their ability to produce high stiffness rather than large force. This robust and simple strategy ensured task success at the expense of energy efficiency. Our results confirm the ability of humans to predictively set and control mechanical impedance in task-relevant directions in anticipation of breaking contact. This offers the prospect that future investigations will find neural correlates of impedance, which in turn, could improve the ability of neuro-prosthetic limbs to interact with objects.
@article{Zhang_2025, author = {Zhang, Chenguang and Tessari, Federico and Hermus, James and Akolkar, Himanshu and Hogan, Neville and Schwartz, Andrew B.}, doi = {10.1038/s41598-025-14989-8}, isbn = {2045-2322}, journal = {Scientific Reports}, number = {1}, pages = {29916}, title = {Tuning of task-relevant stiffness in multiple directions}, volume = {15}, year = {2025}, } -
 Learning the Inverse Hitting ProblemHarshit Khurana, James Hermus, Maxime Gautier, and 1 more authorIEEE Robotics and Automation Letters 2025
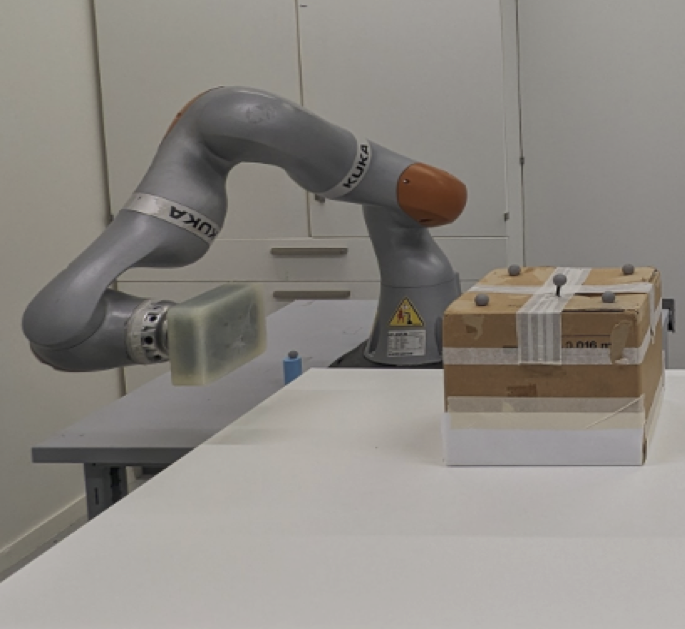
Learning the Inverse Hitting ProblemHarshit Khurana, James Hermus, Maxime Gautier, and 1 more authorIEEE Robotics and Automation Letters 2025This letter presents a data collection framework and a learning model to understand the motion of an object after being subject to an impulse. The data collection framework consists of an automated dual arm setup hitting an object to each other, like a collaborative air-hockey game. An impact aware extended Kalman filter is proposed for automation of the air-hockey setup which approximates the discontinuous impulse motion equations through a hitting force model by balancing the energies during collision. To capture the variance in the motion that stochasticity of friction introduces, the errors in the controls for the hitting flux, we model the stochastic relationship between hitting flux and object’s resulting displacement, using full density modeling. Further we show the application of the learnt motion model for planning sequential hits with two or more robots, in a Golf-like principle, to enable an object to reach a location far beyond the reach of a single robot.
@article{Khurana_2025, author = {Khurana, Harshit and Hermus, James and Gautier, Maxime and Billard, Aude}, journal = {IEEE Robotics and Automation Letters}, title = {Learning the Inverse Hitting Problem}, year = {2025}, volume = {10}, number = {5}, pages = {4180-4187}, keywords = {Robots;Data models;Force;Friction;Predictive models;Kalman filters;Data collection;Analytical models;Sports;Planning;Impact aware manipulation;robot collaboration;impact aware extended Kalman filter;dual arm system;GMM;GMR;golf}, doi = {10.1109/LRA.2025.3548496}, }
2024
-
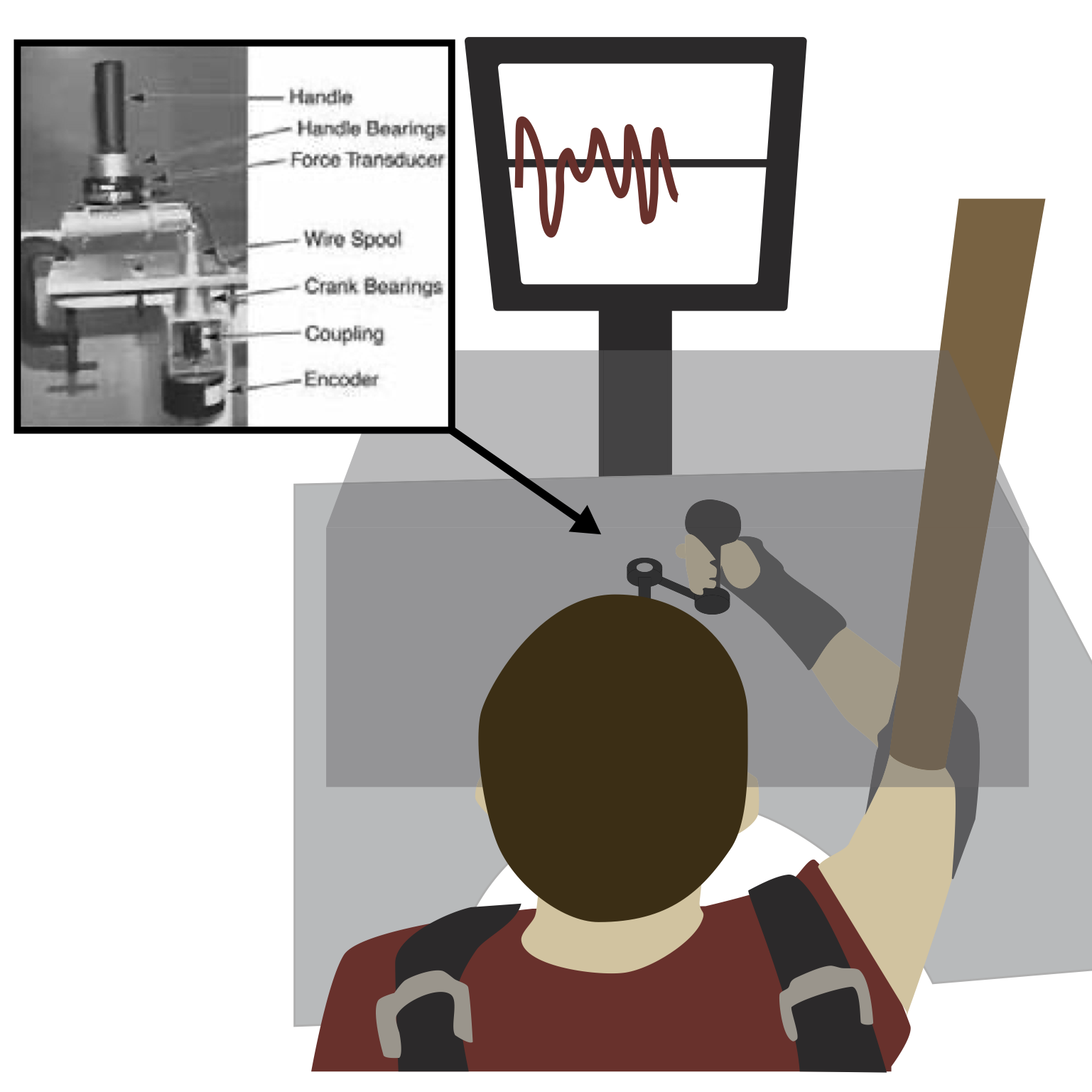
 Brownian Proceses in Human Motor Control Support Descending Neural Velocity CommandsFederico Tessari, James Hermus, Rika Sugimoto-Dimitrova, and 1 more authorScientific Reports 2024
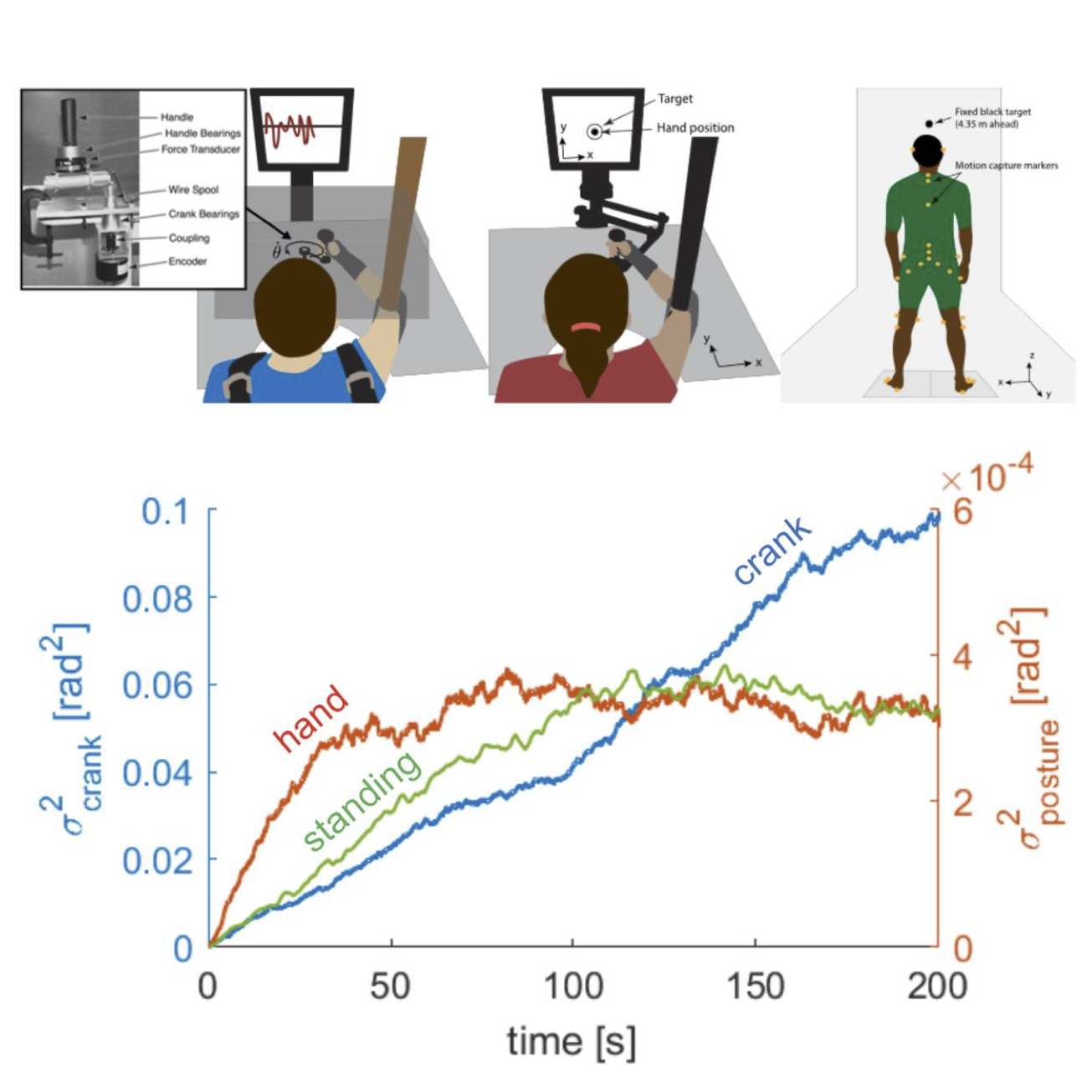
Brownian Proceses in Human Motor Control Support Descending Neural Velocity CommandsFederico Tessari, James Hermus, Rika Sugimoto-Dimitrova, and 1 more authorScientific Reports 2024The motor neuroscience literature suggests that the central nervous system may encode some motor commands in terms of velocity. In this work, we tackle the question: what consequences would velocity commands produce at the behavioral level? Considering the ubiquitous presence of noise in the neuromusculoskeletal system, we predict that velocity commands affected by stationary noise would produce “random walks”, also known as Brownian processes, in position. Brownian motions are distinctively characterized by a linearly growing variance and a power spectral density that declines in inverse proportion to frequency. This work first shows that these Brownian processes are indeed observed in unbounded motion tasks e.g., rotating a crank. We further predict that such growing variance would still be present, but bounded, in tasks requiring a constant posture e.g., maintaining a static hand position or quietly standing. This hypothesis was also confirmed by experimental observations. A series of descriptive models are investigated to justify the observed behavior. Interestingly, one of the models capable of accounting for all the experimental results must feature forward-path velocity commands corrupted by stationary noise. The results of this work provide behavioral support for the hypothesis that humans plan the motion components of their actions in terms of velocity.
@article{Tessari_2024, author = {Tessari, Federico and Hermus, James and Sugimoto-Dimitrova, Rika and Hogan, Neville}, title = {Brownian Proceses in Human Motor Control Support Descending Neural Velocity Commands}, journal = {Scientific Reports}, volume = {14}, number = {1}, pages = {8341}, year = {2024}, doi = {10.1038/s41598-024-58380-5}, } -
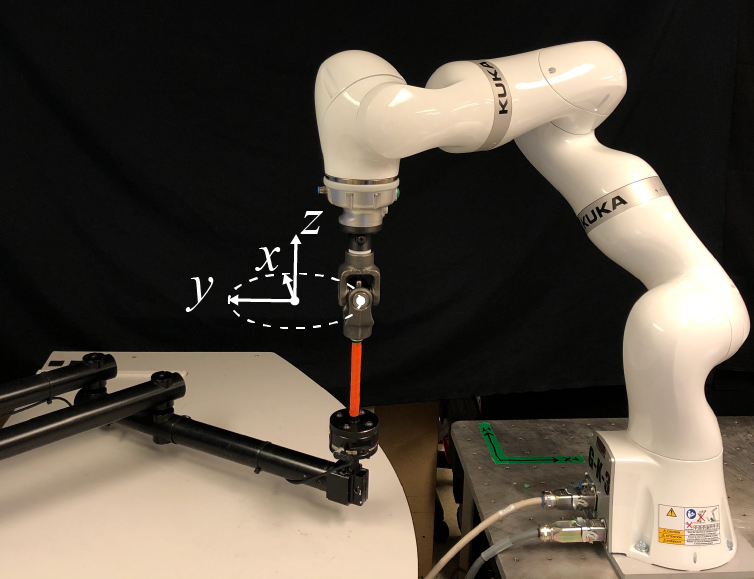
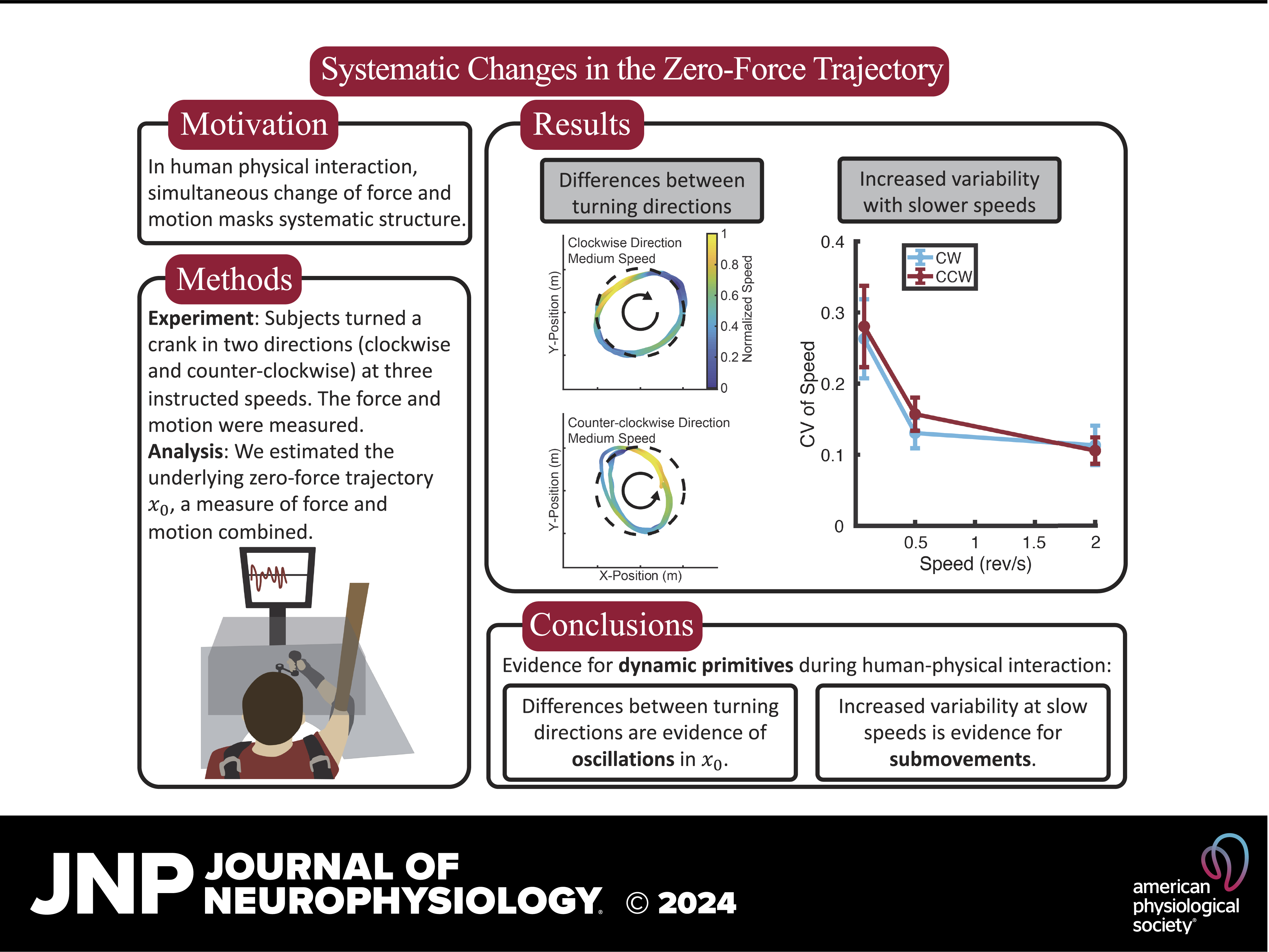 Dynamic Primitives in Constrained Action: Systematic Changes in the Zero-Force TrajectoryJames Hermus, Joseph Doeringer, Dagmar Sternad, and 1 more authorJournal of Neurophysiology 2024
Dynamic Primitives in Constrained Action: Systematic Changes in the Zero-Force TrajectoryJames Hermus, Joseph Doeringer, Dagmar Sternad, and 1 more authorJournal of Neurophysiology 2024Humans substantially outperform robotic systems in tasks that require physical interaction, despite seemingly inferior muscle bandwidth and slow neural information transmission. The control strategies that enable this performance remain poorly understood. To bridge that gap, this study examined kinematically constrained motion as an intermediate step between the widely studied unconstrained motions and sparsely studied physical interactions. Subjects turned a horizontal planar crank in two directions (clockwise and counterclockwise) at three constant target speeds (fast, medium, and very slow) as instructed via visual display. With the hand constrained to move in a circle, nonzero forces against the constraint were measured. This experiment exposed two observations that could not result from mechanics alone but may be attributed to neural control composed of dynamic primitives. A plausible mathematical model of interactive dynamics (mechanical impedance) was assumed and used to subtract peripheral neuromechanics. This method revealed a summary of the underlying neural control in terms of motion, a zero-force trajectory. The estimated zero-force trajectories were approximately elliptical and their orientation differed significantly with turning direction; that is consistent with control using oscillations to generate an elliptical zero-force trajectory. However, for periods longer than 2-5 s, motion can no longer be perceived or executed as periodic. Instead, it decomposes into a sequence of submovements, manifesting as increased variability. These quantifiable performance limitations support the hypothesis that humans simplify this constrained-motion task by exploiting at least three primitive dynamic actions: oscillations, submovements, and mechanical impedance.
NEW & NOTEWORTHY: Control using primitive dynamic actions may explain why human performance is superior to robots despite seemingly inferior wetware; however, this also implies limitations. For a crank-turning task, this work quantified two such informative limitations. Force was exerted even though it produced no mechanical work, the underlying zero-force trajectory was roughly elliptical, and its orientation differed with turning direction, evidence of oscillatory control. At slow speeds, speed variability increased substantially, indicating intermittent control via submovements.
@article{Hermus_2024, author = {Hermus, James and Doeringer, Joseph and Sternad, Dagmar and Hogan, Neville}, title = {Dynamic Primitives in Constrained Action: Systematic Changes in the Zero-Force Trajectory}, journal = {Journal of Neurophysiology}, volume = {131}, number = {1}, pages = {1-15}, year = {2024}, doi = {10.1152/jn.00082.2023}, note = {PMID: 37820017}, }
2023
-
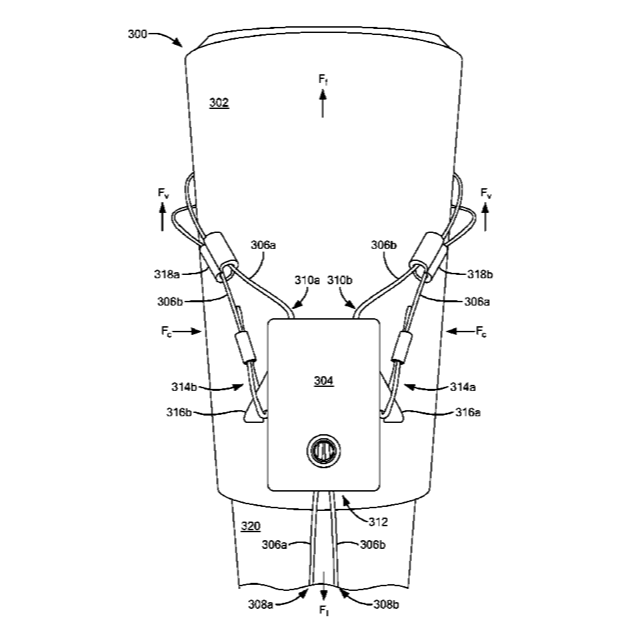 Variable Compression Body AnchorMeghan Huber, James Hermus, Gabrielle Enns, and 1 more author2023
Variable Compression Body AnchorMeghan Huber, James Hermus, Gabrielle Enns, and 1 more author2023In some embodiments, a body anchor for supporting an assistive device can include: a cuff to exert a compression force on a body part of a user; and one or more tensile elements having first ends and second ends. The first ends of the tensile elements can be configured to be attached to the assistive device. The second ends of the tensile elements can be arranged about the cuff to cause the compression force to vary in proportion to a load exerted by the assistive device.
@patent{US11690776, author = {Huber, Meghan and Hermus, James and Enns, Gabrielle and Hogan, Neville}, title = {Variable Compression Body Anchor}, year = {2023}, type = {Utility Patent}, number = {US 11,690,776 B2}, holder = {Massachusetts Institute of Technology}, url = {https://patents.google.com/patent/US11690776B2/en}, } -
 A Dynamic Primitives Hypothesis: A Descriptive Model of Human Physical InteractionJames Hermus2023
A Dynamic Primitives Hypothesis: A Descriptive Model of Human Physical InteractionJames Hermus2023Physical interaction is a key aspect of activities of daily living. These tasks require simultaneous regulation of both force and motion. For example, even a task as simple as opening a door presents a challenge to the development of prosthetics, exoskeletons, and human-robot interaction. Motor neuroscience has reported systematic patterns of motion during free reaching and force during static posture. However, similar results do not extend to physical interaction. A descriptive model is required. The paradox of human performance: Despite large feedback delays, and many degrees of freedom, humans are incredibly dexterous and excel at physical interaction with complex objects. To accomplish such performance, we hypothesize that motor behavior, with and without physical interaction, is constructed using a limited set of primitive dynamic behaviors, including oscillations, submovements, and mechanical impedance. We not only propose that these ‘building blocks’ exist but that their connectivity is important – a Norton equivalent network. This thesis is composed of four components that systematically investigated this hypothesis. (1) Through the study of crank turning we presented evidence for dynamic primitives. (2) To test the hypothesis, a method to estimate impedance during crank turning was developed. (3) When kinematic redundancy was substantial, a dynamic primitive-based control resolved redundancy without compromising performance. (4) This hypothesis led to the development of an experiment which falsified a common assumption, that humans can directly regulate force during motion. While it is fundamentally hard to prove hypotheses in human motor control, the hypothesis of dynamic primitives can descriptively account for systematic patterns in constrained motion. Furthermore, the value of this hypothesis was demonstrated in robotics by simplifying the management of kinematic redundancy and force regulation.
@phdthesis{Hermus_2023_thesis, author = {Hermus, James}, title = {A Dynamic Primitives Hypothesis: A Descriptive Model of Human Physical Interaction}, school = {Massachusetts Institute of Technology}, year = {2023}, type = {Ph.D. Thesis}, }
2022
-
 Dynamic Primitives Limit Human Force Regulation during MotionA. Michael West, James Hermus, Meghan Huber, and 3 more authorsIEEE Robotics and Automation Letters 2022
Dynamic Primitives Limit Human Force Regulation during MotionA. Michael West, James Hermus, Meghan Huber, and 3 more authorsIEEE Robotics and Automation Letters 2022Humans excel at physical interaction despite long feedback delays and low-bandwidth actuators. Yet little is known about how humans manage physical interaction. A quantitative understanding of how they do is critical for designing machines that can safely and effectively interact with humans, e.g. amputation prostheses, assistive exoskeletons, therapeutic rehabilitation robots, and physical human-robot collaboration. To facilitate applications, this understanding should be in the form of a simple mathematical model that not only describes humans’ capabilities but also their limitations. In robotics, hybrid control allows simultaneous, independent control of both motion and force and it is often assumed that humans can modulate force independent of motion as well. This letter experimentally tested that assumption. Participants were asked to apply a constant 5 N force on a robot manipulandum that moved along an elliptical path. After initial improvement, force errors quickly plateaued, despite practice and visual feedback. Within-trial analyses revealed that force errors varied with position on the ellipse, rejecting the hypothesis that humans have independent control of force and motion. The findings are consistent with a feed-forward motion command composed of two primitive oscillations acting through mechanical impedance to evoke force.
@article{West_2022, author = {West, A. Michael and Hermus, James and Huber, Meghan and Maurice, Pauline and Sternad, Dagmar and Hogan, Neville}, doi = {10.1109/LRA.2022.3141778}, journal = {IEEE Robotics and Automation Letters}, pages = {1-1}, title = {Dynamic Primitives Limit Human Force Regulation during Motion}, year = {2022}, } -
 Exploiting Redundancy to Facilitate Physical InteractionJames Hermus, Johannes Lachner, David Verdi, and 1 more authorIEEE Transactions on Robotics 2022
Exploiting Redundancy to Facilitate Physical InteractionJames Hermus, Johannes Lachner, David Verdi, and 1 more authorIEEE Transactions on Robotics 2022The control of kinematically redundant robots is often approached using nullspace projection, which requires precise models and can be computationally challenging. Humans have many more degrees of freedom than are required to accomplish their tasks, but given neuromechanical limitations, it seems unlikely that biology relies on precise models or complex computation. An alternative biologically inspired approach leverages the compositionality of mechanical impedance. In theory, nullspace projection eliminates any conflict between two tasks. In contrast, superposition of task-space impedance and a full-rank joint-space impedance may impose a task conflict. This work compared nullspace projection with impedance superposition during unconstrained motion and forceful physical interaction. In practice, despite their theoretical differences, we did not observe a substantial influence of the nullspace projector weighting matrix. We found that nullspace projection and impedance superposition both resulted in measurable task conflict. Remarkably, when the dimensionality of the nullspace was increased, impedance superposition was comparable to nullspace projection.
@article{Hermus_2022, author = {Hermus, James and Lachner, Johannes and Verdi, David and Hogan, Neville}, doi = {10.1109/TRO.2021.3086632}, journal = {IEEE Transactions on Robotics}, number = {1}, pages = {599-615}, title = {Exploiting Redundancy to Facilitate Physical Interaction}, volume = {38}, year = {2022}, }
2020
-
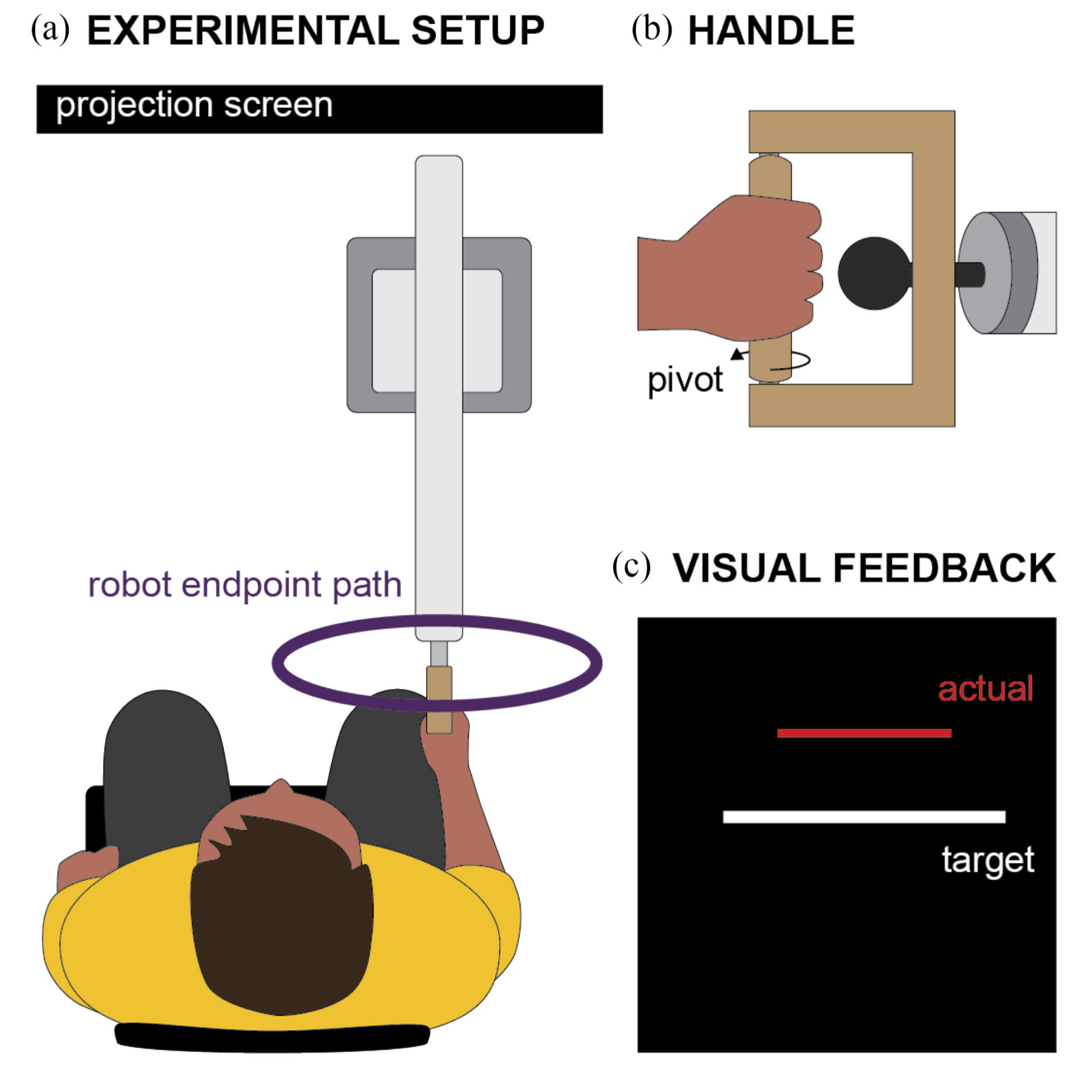
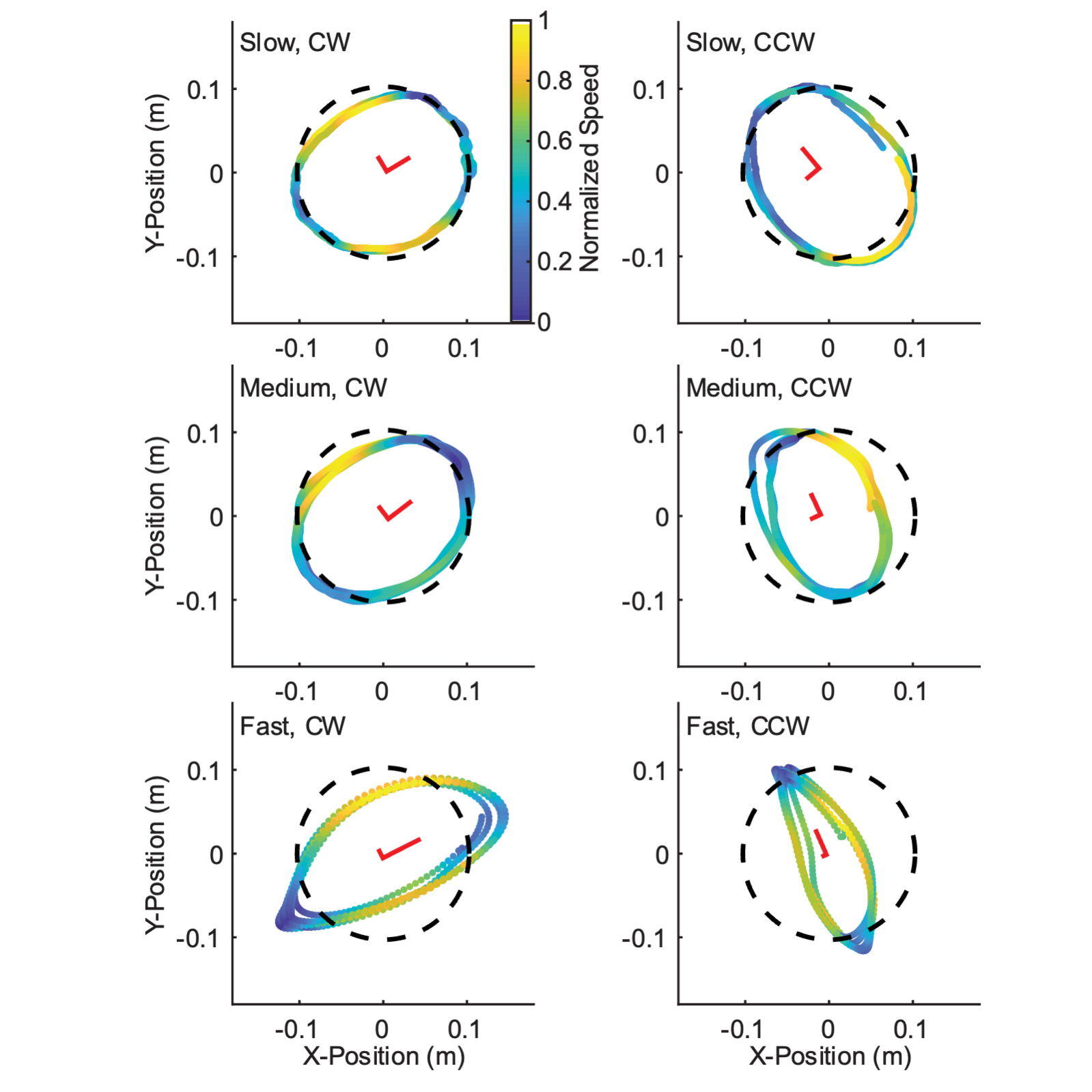 Evidence for Dynamic Primitives in a Constrained Motion TaskJames Hermus, Dagmar Sternad, and Neville HoganIn 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob) 2020
Evidence for Dynamic Primitives in a Constrained Motion TaskJames Hermus, Dagmar Sternad, and Neville HoganIn 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob) 2020Ten right-handed male subjects turned a crank (radius 10.29 cm) in two directions at three constant instructed speeds (fast, medium, very slow) with visual speed feedback. They completed 23 trials at each speed. With the hand constrained to move in a circle, non-zero forces against the constraint were measured. Assuming a plausible mathematical model of interactive dynamics, the peripheral neuromechanics could be ‘subtracted’, revealing an underlying motion that reflected neural control. We called this data-driven construct the zeroforce trajectory. The observed zero-force trajectory was approximately elliptical. Its major axis, estimated by the principal eigenvector of the covariance matrix, differed significantly for the two movement directions. As peripheral neuromuscular compliance (i.e. low mechanical impedance) mitigates the consequences of imperfect execution, the required precision of motion commands is reduced. An oscillatory zeroforce trajectory that leads hand motion suffices to produce circular hand motions. Due to non-isotropic peripheral dynamics, that lead differs between degrees of freedom, resulting in an elliptical zero-force trajectory. The ellipses’ orientations differ with direction of rotation, as observed in the experimental data. As elliptical motion is generated by two non-colinear sinusoids with non-zero phase difference, these results support the hypothesis that humans simplify this constrained-motion task by exploiting primitive dynamic actions, oscmations and impedance.
@inproceedings{Hermus_2020_BioRob, author = {Hermus, James and Sternad, Dagmar and Hogan, Neville}, booktitle = {2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob)}, title = {Evidence for Dynamic Primitives in a Constrained Motion Task}, year = {2020}, volume = {}, number = {}, pages = {551-556}, doi = {10.1109/BioRob49111.2020.9224352}, keywords = {Trajectory;Force;Dynamics;Impedance;Mathematical model;Damping;Visualization}, } -
 Separating Neural Influences from Peripheral Mechanics: the Speed-Curvature Relation in Mechanically Constrained ActionsJames Hermus, Joseph Doeringer, Dagmar Sternad, and 1 more authorJournal of Neurophysiology 2020
Separating Neural Influences from Peripheral Mechanics: the Speed-Curvature Relation in Mechanically Constrained ActionsJames Hermus, Joseph Doeringer, Dagmar Sternad, and 1 more authorJournal of Neurophysiology 2020While the study of unconstrained movements has revealed important features of neural control, generalizing those insights to more sophisticated object manipulation is challenging. Humans excel at physical interaction with objects, even when those objects introduce complex dynamics and kinematic constraints. This study examined humans turning a horizontal planar crank (radius 10.29 cm) at their preferred and three instructed speeds (with visual feedback), both in clockwise and counterclockwise directions. To explore the role of neuromechanical dynamics, the instructed speeds covered a wide range: fast (near the limits of performance), medium (near preferred speed), and very slow (rendering dynamic effects negligible). Because kinematically constrained movements involve significant physical interaction, disentangling neural control from the influences of biomechanics presents a challenge. To address it, we modeled the interactive dynamics to “subtract off” peripheral biomechanics from observed force and kinematic data, thereby estimating aspects of underlying neural action that may be expressed in terms of motion. We demonstrate the value of this method: remarkably, an approximately elliptical path emerged, and speed minima coincided with curvature maxima, similar to what is seen in unconstrained movements, even though the hand moved at nearly constant speed along a constant-curvature path. These findings suggest that the neural controller takes advantage of peripheral biomechanics to simplify physical interaction. As a result, patterns seen in unconstrained movements persist even when physical interaction prevents their expression in hand kinematics. The reemergence of a speed-curvature relation indicates that it is due, at least in part, to neural processes that emphasize smoothness and predictability.
NEW & NOTEWORTHY: Physically interacting with kinematic constraints is commonplace in everyday actions. We report a study of humans turning a crank, a circular constraint that imposes constant hand path curvature and hence should suppress variations of hand speed due to the power-law speed-curvature relation widely reported for unconstrained motions. Remarkably, we found that, when peripheral biomechanical factors are removed, a speed-curvature relation reemerges, indicating that it is, at least in part, of neural origin.
@article{Hermus_2020, author = {Hermus, James and Doeringer, Joseph and Sternad, Dagmar and Hogan, Neville}, doi = {10.1152/jn.00536.2019}, eprint = {https://doi.org/10.1152/jn.00536.2019}, journal = {Journal of Neurophysiology}, note = {PMID: 32159419}, number = {5}, pages = {1870-1885}, title = {Separating Neural Influences from Peripheral Mechanics: the Speed-Curvature Relation in Mechanically Constrained Actions}, volume = {123}, year = {2020}, }
2018
-
 Gauging Force by Tapping TendonsJack A. Martin, Scott C. E. Brandon, Emily M. Keuler, and 5 more authorsNature Communications 2018
Gauging Force by Tapping TendonsJack A. Martin, Scott C. E. Brandon, Emily M. Keuler, and 5 more authorsNature Communications 2018Muscles are the actuators that drive human movement. However, despite many decades of work, we still cannot readily assess the forces that muscles transmit during human movement. Direct measurements of muscle–tendon loads are invasive and modeling approaches require many assumptions. Here, we introduce a non-invasive approach to assess tendon loads by tracking vibrational behavior. We first show that the speed of shear wave propagation in tendon increases with the square root of axial stress. We then introduce a remarkably simple shear wave tensiometer that uses micron-scale taps and skin-mounted accelerometers to track tendon wave speeds in vivo. Tendon wave speeds are shown to modulate in phase with active joint torques during isometric exertions, walking, and running. The capacity to non-invasively assess muscle–tendon loading can provide new insights into the motor control and biomechanics underlying movement, and could lead to enhanced clinical treatment of musculoskeletal injuries and diseases.
@article{Martin_2018, author = {Martin, Jack A. and Brandon, Scott C. E. and Keuler, Emily M. and Hermus, James R. and Ehlers, Alexander C. and Segalman, Daniel J. and Allen, Matthew S. and Thelen, Darryl G.}, doi = {10.1038/s41467-018-03797-6}, isbn = {2041-1723}, journal = {Nature Communications}, number = {1}, pages = {1592}, title = {Gauging Force by Tapping Tendons}, ty = {JOUR}, volume = {9}, year = {2018}, }
2016
-
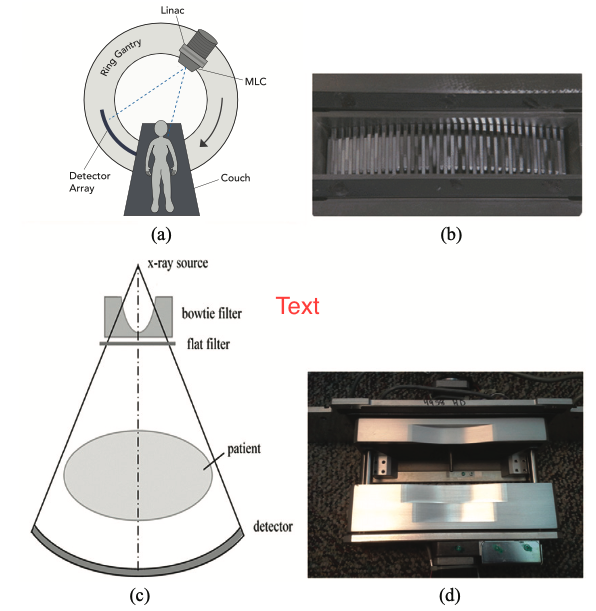
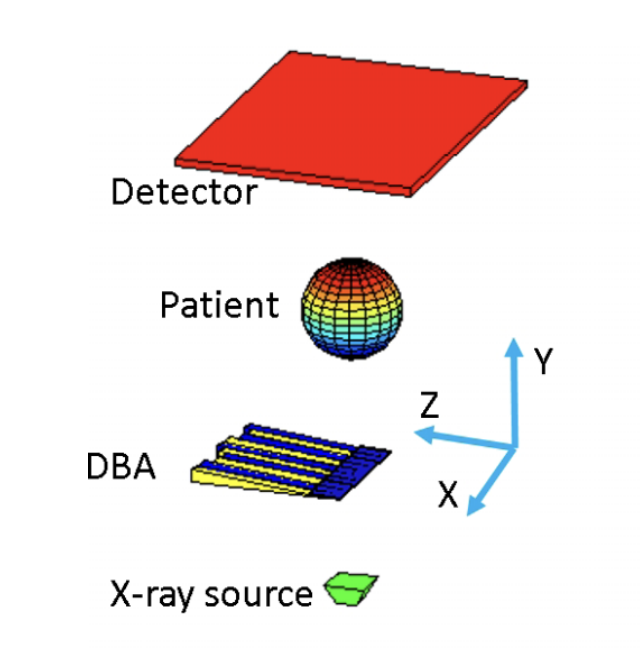
 Two-dimensional Dynamic Fluid Bowtie AttenuatorsJames R. Hermus, and Timothy P. SzczykutowiczJournal of Medical Imaging 2016
Two-dimensional Dynamic Fluid Bowtie AttenuatorsJames R. Hermus, and Timothy P. SzczykutowiczJournal of Medical Imaging 2016Fluence field modulated (FFM) CT allows for improvements in image quality and dose reduction. To date, only one-dimensional modulators have been proposed, as the extension to two-dimensional (2-D) modulation is difficult with solid-metal attenuation-based fluence field modulated designs. This work proposes to use liquid and gas to attenuate the x-ray beam, as unlike solids, these materials can be arranged allowing for 2-D fluence modulation. The thickness of liquid and the pressure for a given path length of gas were determined that provided the same attenuation as 30 cm of soft tissue at 80, 100, 120, and 140 kV. Liquid iodine, zinc chloride, cerium chloride, erbium oxide, iron oxide, and gadolinium chloride were studied. Gaseous xenon, uranium hexafluoride, tungsten hexafluoride, and nickel tetracarbonyl were also studied. Additionally, we performed a proof-of-concept experiment using a 96 cell array in which the liquid thickness in each cell was adjusted manually. Liquid thickness varied as a function of kV and chemical composition, with erbium oxide allowing for the smallest thickness. For the gases, tungsten hexaflouride required the smallest pressure to compensate for 30 cm of soft tissue. The 96 cell iodine attenuator allowed for a reduction in both dynamic range to the detector and scatter-to-primary ratio. For both liquids and gases, when k-edges were located within the diagnostic energy range used for imaging, the mean beam energy exhibited the smallest change with compensation amount. The thickness of liquids and the gas pressure seem logistically implementable within the space constraints of C-arm-based cone beam CT (CBCT) and diagnostic CT systems. The gas pressures also seem logistically implementable within the space and tube loading constraints of CBCT and diagnostic CT systems.
@article{Hermus_2016, author = {Hermus, James R. and Szczykutowicz, Timothy P.}, title = {Two-dimensional Dynamic Fluid Bowtie Attenuators}, volume = {3}, journal = {Journal of Medical Imaging}, number = {1}, publisher = {SPIE}, pages = {013502}, keywords = {computed tomography, fluence field modulated computed tomography, dynamic bowtie filter, Liquids, Attenuators, Tissues, Signal detection, Modulation, Sensors, Signal attenuation, Modulators, Iodine, Gases}, year = {2016}, doi = {10.1117/1.JMI.3.1.013502}, }
2015
-
 Realization of Fluence Field Modulated CT on a Clinical TomoTherapy Megavoltage CT SystemTimothy P Szczykutowicz, James Hermus, Mark Geurts, and 1 more authorPhysics in Medicine & Biology 2015
Realization of Fluence Field Modulated CT on a Clinical TomoTherapy Megavoltage CT SystemTimothy P Szczykutowicz, James Hermus, Mark Geurts, and 1 more authorPhysics in Medicine & Biology 2015The multi-leaf collimator (MLC) assembly present on TomoTherapy (Accuray, Madison WI) radiation therapy (RT) and mega voltage CT machines is well suited to perform fluence field modulated CT (FFMCT). In addition, there is a demand in the RT environment for FFMCT imaging techniques, specifically volume of interest (VOI) imaging.
A clinical TomoTherapy machine was programmed to perform VOI. Four different size ROIs were placed at varying distances from isocenter. Projections intersecting the VOI received ’full dose’ while those not intersecting the VOI received 30% of the dose (i.e. the incident fluence for non VOI projections was 30% of the incident fluence for projections intersecting the VOI). Additional scans without fluence field modulation were acquired at ’full’ and 30% dose. The noise (pixel standard deviation) and mean CT number were measured inside the VOI region and compared between the three scans. Dose maps were generated using a dedicated TomoTherapy treatment planning dose calculator.
The VOI-FFMCT technique produced an image noise 1.05, 1.00, 1.03, and 1.05 times higher than the ’full dose’ scan for ROI sizes of 10cm, 13cm, 10cm, and 6cm respectively within the VOI region. The VOI-FFMCT technique required a total imaging dose equal to 0.61, 0.69, 0.60, and 0.50 times the ’full dose’ acquisition dose for ROI sizes of 10cm, 13cm, 10cm, and 6cm respectively within the VOI region.
Noise levels can be almost unchanged within clinically relevant VOIs sizes for RT applications while the integral imaging dose to the patient can be decreased, and/or the image quality in RT can be dramatically increased with no change in dose relative to non-FFMCT RT imaging. The ability to shift dose away from regions unimportant for clinical evaluation in order to improve image quality or reduce imaging dose has been demonstrated. This paper demonstrates that FFMCT can be performed using the MLC on a clinical TomoTherapy machine for the first time.
@article{Szczykutowicz_2015a, title = {Realization of Fluence Field Modulated CT on a Clinical TomoTherapy Megavoltage CT System}, author = {Szczykutowicz, Timothy P and Hermus, James and Geurts, Mark and Smilowitz, Jennifer}, journal = {Physics in Medicine \& Biology}, volume = {60}, number = {18}, pages = {7245}, year = {2015}, publisher = {IOP Publishing}, } -
 Creation of an Atlas of Filter Positions for Fluence Field Modulated CTTimothy P. Szczykutowicz, and James HermusMedical Physics 2015
Creation of an Atlas of Filter Positions for Fluence Field Modulated CTTimothy P. Szczykutowicz, and James HermusMedical Physics 2015Purpose: Fluence field modulated CT (FFMCT) and volume of interest (VOI) CT imaging applications require adjustment of the profile of the x-ray fluence incident on a patient as a function of view angle. Since current FFMCT prototypes can theoretically take on an infinite number of configurations, measuring a calibration data set for all possible positions would not be feasible. The present work details a methodology for calculating an atlas of configurations that will span all likely body regions, patient sizes, patient positioning, and imaging modes. The hypothesis is that there exists a finite number of unique modulator configurations that effectively span the infinite number of possible fluence profiles with minimal loss in performance.
Methods: CT images of a head, shoulder, thorax, abdominal, wrist, and leg anatomical slices were dilated and contracted to model small, medium, and large sized patients. Additionally, the images were positioned from iso-center by three different amounts. The modulator configurations required to compensate for each image were computed assuming a FFMCT prototype, digital beam attenuator, (DBA), was set to equalize the detector exposure. Each atlas configuration should be different from the other atlas configurations. The degree of difference was quantified using the sum of the absolute differences in filter thickness between configurations. Using this metric, a set of unique wedge configurations for which no two configurations have a metric value smaller than some threshold can be constructed. Differences in the total number of incident photons between the unconstrained filters and the atlas were studied as a function of the number of atlas positions for each anatomical site and size/off-centering combination.
Results: By varying the threshold used in creating the atlas, it was found that roughly 322 atlas positions provided an incident number of photons within 20% of using 19,440 unique filters (the number of atlas entries ranged from 7213 to 1). Additionally, for VOI applications implemented with a single VOI region, the number of required filter configurations was expressed in a simple closed form solution.
Conclusions: The methodology proposed in this work will enable DBA-FFMCT and DBA-VOI imaging in the clinic without the need for patient specific air-scans to be performed. In addition, the methodology proposed here is directly applicable to other modulator designs such as piecewise linear, TomoTherapy multi leaf collimators, 2D fluid arrays, and inverse geometry CT.
@article{Szczykutowicz_2015b, author = {Szczykutowicz, Timothy P. and Hermus, James}, title = {Creation of an Atlas of Filter Positions for Fluence Field Modulated CT}, journal = {Medical Physics}, volume = {42}, number = {4}, pages = {1779-1786}, keywords = {attenuators, biological organs, calibration, collimators, computerised tomography, dosimetry, filters, Computed tomography, Standards and calibration, X- and γ-ray instruments, Dosimetry/exposure assessment, Computerised tomographs, Testing or calibrating of apparatus or arrangements provided for in groups G01D1/00 to G01D15/00, Biological material, e.g. blood, urine; Haemocytometers, Calibrating of instruments or apparatus, Using diaphragms, collimators, Devices sensitive to very short wavelength, e.g. x-rays, gamma-rays or corpuscular radiation, Transforming x-rays, X-ray technique, Scintigraphy, dose modulation, fluence field modulation, dynamic bowtie, Medical imaging, Acoustic noise rating, Photons, Cone beam computed tomography, Image sensors, Calibration, Modulators, Tissues, Heart}, doi = {https://doi.org/10.1118/1.4915123}, year = {2015}, }